Safety for all
The research partnership SAFIR links the Technische Hochschule Ingolstadt with more than 20 partners from industry and public institutions and aims to raise traffic safety to a new level. The research program is embedded in the CARISSMA research and testing center and benefits from the use of the infrastructure and the expertise of the professors in the respective topics.
SAFIR Cluster 1: simulation-based test systems for the pre-crash phase
The development of highly interconnected, integral global security functions to highly automated vehicles is increasing the complexity and testing requirements. A promising approach to managing complexity and limiting costs is to continuously increase the virtualization share of test systems. The cluster takes advantage of state-of-the-art virtual development methods and -tools and complements the missing aspects of global security systems. The aim is a simulation-based test drive for vehicle safety 4.0. This cluster is currently working on the impulse project “Mixed Reality Test Environment for Safety-Critical Functions in Highly Automated Driving”.
Subproject: Sensor simulation with a focus on weather conditions
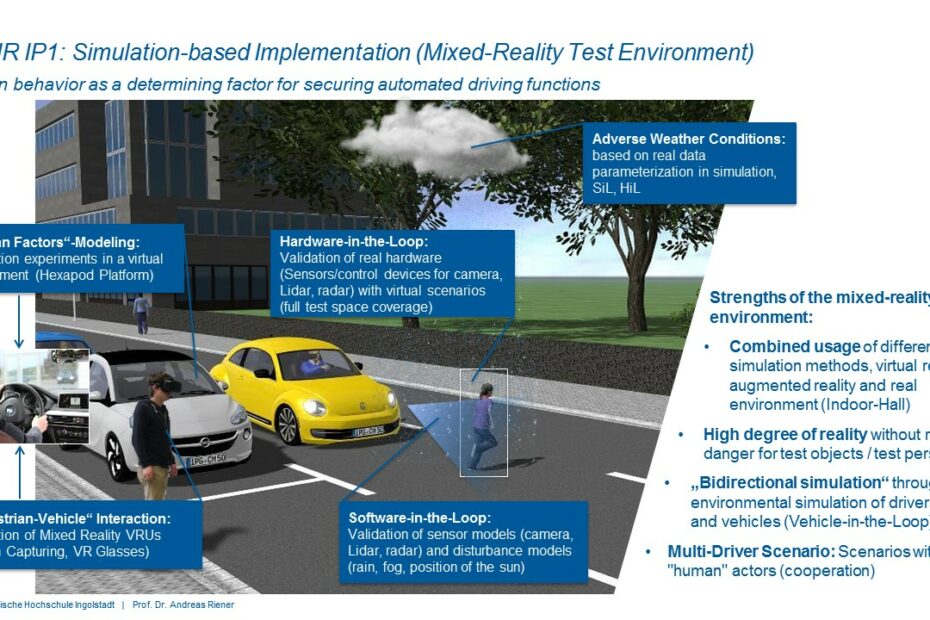
The non-reproducibility of the environment and accompanying difficulty in reconstructing scenarios is one of the greatest challenges of endurance testing. Unfavorable weather conditions in particular, such as rain, fog, and the position of the sun, can lead to critical sensor effects and to incorrect decisions subsequently being taken by an automated system. The safeguarding of safety systems draws on the aforementioned mixed reality test environment, enabling testing both in real life under reproducible conditions and virtually in simulation environments.
Statistical and dynamic tests can be made at variable rain intensities and fog visibility using indoor weather units developed in-house and validated with measurements taken under natural conditions. The use of a test hall for testing purposes ensures stable general conditions. In addition, by employing disturbance models, it is possible to perform purely virtual testing of algorithms to determine weather effects. A considerable increase in a system’s robustness can be effected by conducting tests at an early stage.
MiRE – Mixed Reality Environment
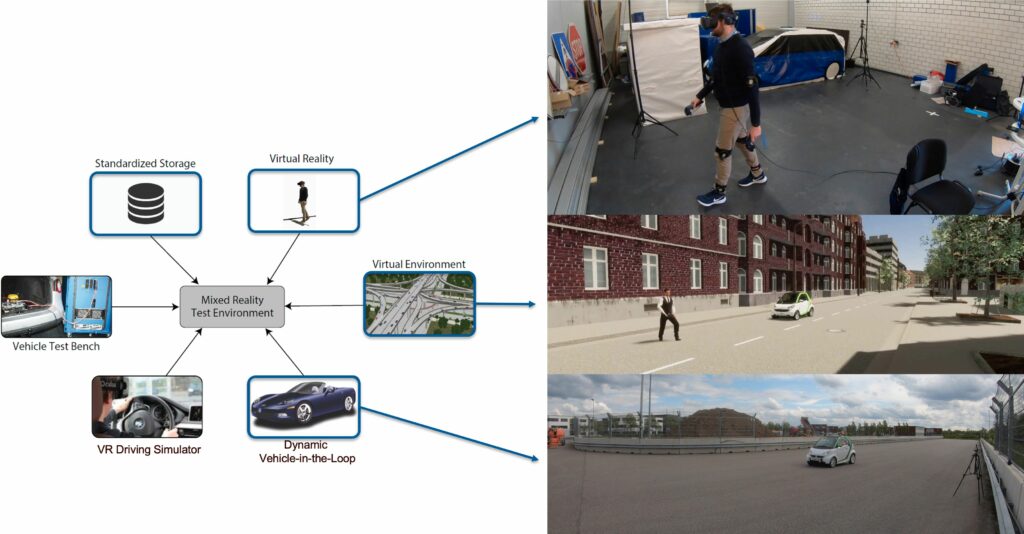
With the current advances in automated driving functions, the effort to test these safety-critical systems will increase exponentially in the future. Unfortunately, current test procedures in real-world testing will not be a viable solution to test all new automated driving functions since it will be too resource-intensive to conduct these tests in a real environment. However, in a real environment, critical situations can only be approximated to guarantee the safety of all participants. On the other hand, a significant portion of tests is currently conducted in simulated environments. These simulations allow for a highly flexible and great variety of test cases and environments/situations. These simulations can only create a limited representation of the real environment. This means there is a gap between the benefits and drawbacks of real-world and simulation testing. The Mixed Reality Environment MiRE, developed as part of the SAFIR Impulsprojekt I, aims to fill this gap between real-world- and simulated testing. An overarching architecture was developed to integrate virtual and real components and participants into a shared test environment. In this shared environment, the real and virtual components and participants can interact dynamically in real-time, allowing for testing in various situations and cases. Testing in safety-critical scenarios is also possible by integrating digital twins of vulnerable road users (VRUs). Real VRUs can interact with automated vehicles in real time without risking harm to the participants. MiRE integrates a dynamic vehicle-in-the-loop, a pedestrian simulator in virtual reality, and a common virtual environment. The movement of the pedestrian and the vehicle is tracked in real-time and sent to the virtual environment. Digital representations of the pedestrian and the vehicle in the common virtual environment are animated accordingly. Using virtual sensors inside the virtual environment (e.g. a camera), synthetic sensor data from the virtual environment is produced and injected into the vehicles’ perception unit. Using this synthetic data objects from the simulation and thus the real pedestrian inside the pedestrian simulator are detected. Based on the detections, the real vehicle is controlled by automated driving functions. This allows for testing of safety-critical scenarios including VRUs using real participants, without risking harm for any participant or component. This is achieved through the spatial separation of the individual participants, which can be achieved through the distributed architecture of MiRE. This architecture is based on the ASAM Open Simulation Interface (OSI). Using this standardized interface for the simulator interconnection makes it easy to include additional simulators or components in the overarching architecture.
MiRE permits modular testing of:
- Interaction between vehicles and pedestrians
- Novel head-up displays technologies
- Cooperative interaction between drivers and automated vehicles
- High-complexity scenarios
Employees: Jakob Peintner, Philipp Wintersberger, Sinan Hasirlioglu
Project Duration
January 1st, 2017 – July 31, 2021
Project Partners
Granted Funds
9,751,228.00 €
Logo

Funding and Program


Website
SAFIRhttps://www.thi.de/forschung/transfer-an-der-thi/safir-intensivierungsphase/